Shopfox M1111 Mill Conversion - Intro
In 2017 I acquired a Shopfox M1111 benchtop mill. It has an intermittent issue with the spindle motor, but is otherwise mechanically sound. This mill is very similar to the Grizzly X3 mills and is suitable for light-duty milling in aluminum.

Leadscrews
These mills are commonly converted to CNC machines and there are some leadscrew conversions available for purchase. I purchased precision Thomson leadscrews, belts, and pulleys from CNCFusion.com. I see the domain is now expired, so they may not be in business anymore. At the time of my purchase, the entire kit was about $700.





Motors
For the x and y motors I using part number: KL23H286-20-8B:

These have 8 wires and can be wired unipolar, parallel, or series. If wired in parallel, a good operating voltage is: sqrt(6.8)*32 = 83.4V
For the z motor I am using part number: KL34H260-42-8A:

If the z motor, I am planning to write it in series. This configuration will also work well with an approx. 80V supply.
Power Supply
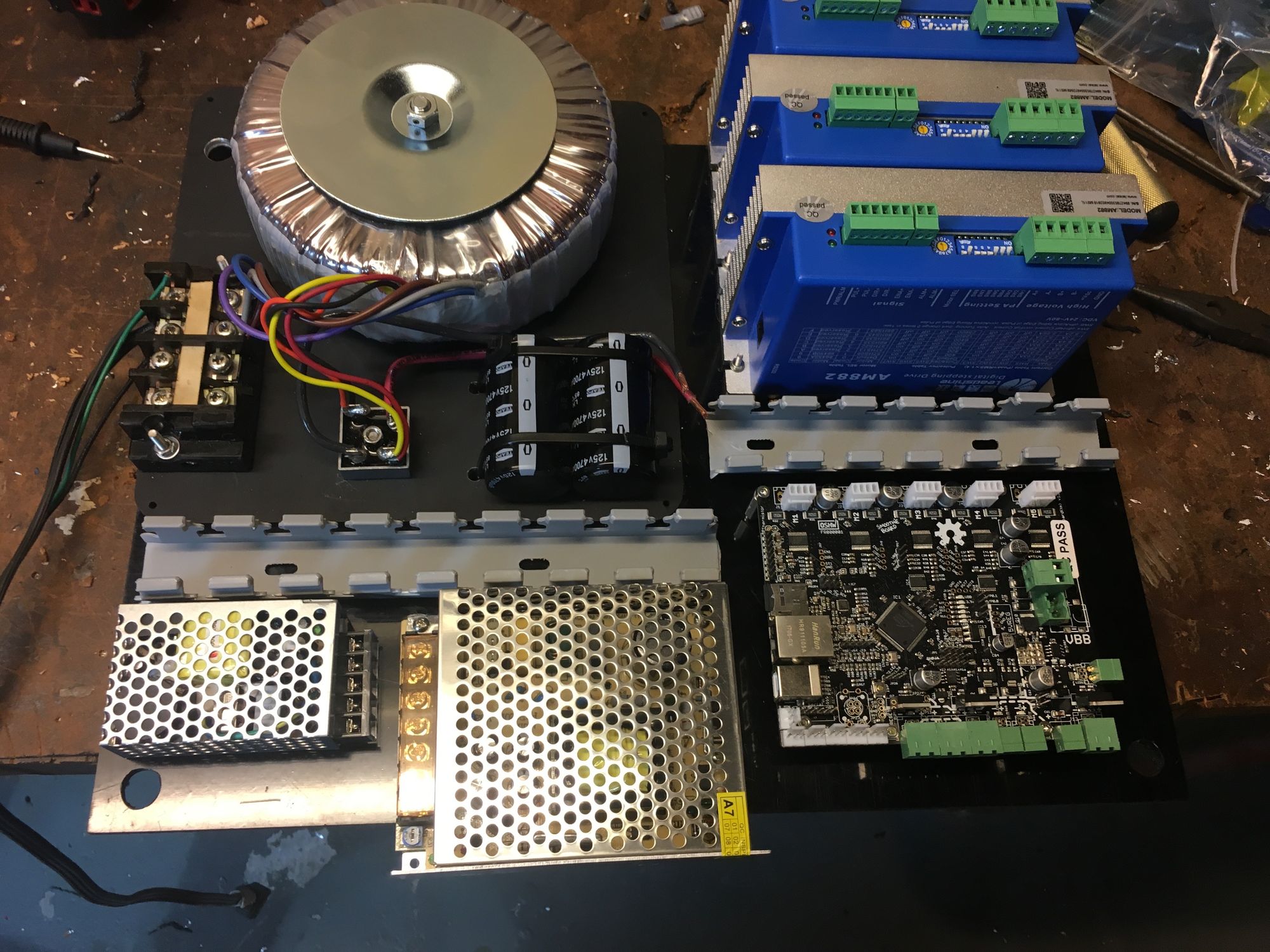
Each of the x and y motors can consume a peak current of 2.8A and the z motor can consume 3A. It is extremely unlikely for all motors to be drawing peak current concurrently for any significant amount of time (even hitting a peak current of 5A is unlikely), but I want to design a power supply capable of supplying 9A @ 80V so that I have some margin. The load regulation is not critical since the stepper drivers are current-mode devices with their own feedback. For this reason, I am using a large toroidal transformer, a full-bridge rectifier, and a couple of large capacitors.
I am using the Y236908 (800VA 50V+50V) Toroidal Transformer from Parts express. After rectification and smoothing I have a relatively clean 75V to work with. The rectifier is a standard 25A, 400V full-bridge rectifier, and the filter capacitors are 4700uF each wired in parallel (125V).

Stepper Drivers:
I am using some high-end drivers from Leadshine for this project. The AM882 drivers are powerful (80V, 8A) and support a number of advanced features like auto-tuning and programming configuration options. I don't have any experience with Leadshine drivers (yet), but they are often described as a cheaper/more powerful alternative to gecko drives.
I mounted the leadshine drivers into a piece of ABS plastic and wired up the motors for programming and testing. I had to create a programming cable using an serial port breakout board and some RJ45 cable in order to program the leadshine drivers (details are available online).

Controller:
For now, I am using a smoothieboard as the motion controller. The smoothieboard is nice because it supports ethernet control and can drive up to six axis. I am not using any of the built-in Allegro drivers – just using the step and direction signals from the smoothieboard. The smoothie firmware makes it easy to setup the step and direction pins as open-drain outputs for interfacing with the Leadshine stepper drivers.
I am considering using Mach4 as my PC-based control software. If I make that change, I will likely need to swap out the smoothieboard for an alternative controller like the smoothstepper.
Enclosure:
I am in the process of mounting everything into a metal enclosure and adding connectors for motors, endstops, etc. I also want to mount a couple of fans to keep the leadshine drivers cool.



Next steps:
- Create enclosure around mill
- Finish wiring endstop connectors
- Design and mount endstops onto CNC mill
- Add leadscrews
- Replace spindle