Building a Robotic Arm - Intro and BOM notes
A coworker recently told me about an open-source 3D-printable arm design available online. Its called the "Moveo" from BCN3D. You can find more info about it here.
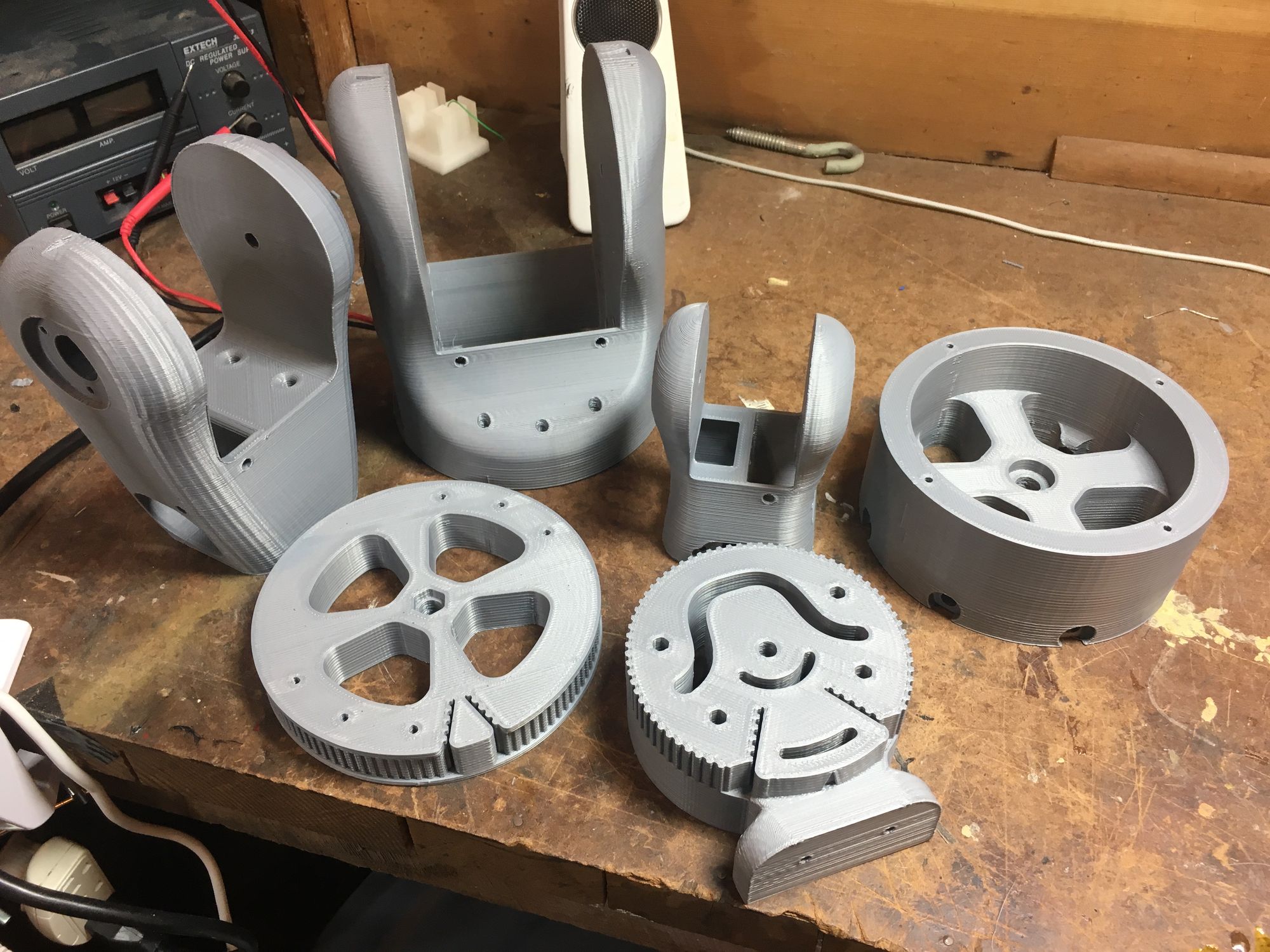
I am going to write a few articles with my experiences building the Moveo as-is. I'll detail some of the parts I chose and give some tips about assembly. I also wrote some Matlab code to drive the arm which I will share and explain. Finally, I made some adjustments to the arm to improve the rigidity and torque of some of the joints. I'll share the details of those modifications.
In this first section, here are some notes about my component selections and some tips for procuring the BOM items which are a little harder to come by. Some of these notes may be outdated by now and the BOM may have been adjusted since. Also, some of these motors ended up not having enough torque for the purposes I want to use the arm for – more detail about that later.
Finding the parts took some time since many of the part numbers in the BOM were difficult to source. I hope the information below may save others some time in finding acceptable replacements.
Motor 1: Stepper motor, NEMA 17SM42HT47-1684
This motor does not appear on either ebay or aliexpress.I found some specs for the motor on a site which now leads to a 404. Luckily, I saved the file in my notes:

These are the SM42HT47 dimensions:

For this motor, I found the 17HS19-2004S1 is a good replacement and it is available from Amazon. It is almost an identical size and has similar specs (3.0mH inductance, 84 vs 62 ozin of torque). It is available for $13.99 with prime shipping here.
Motor 2: Gear Ratio 5:1 Planetary Gearbox Nema 17 Stepper 17HS19-1684S-PG5 ( step 0,35o , 2Nm, 1,68A)
This is available directly from Amazon for $45. Find it here.
Note: I would consider buying an additional one of these. I think it is a good fit for the rotational joint right above the joint this motor is used for. (more info about that later).
Motor 3: Nema 23, 112mm, Ø8mm flat shaft SM57HT112-3004A, step 1,8o, 3A,28Kg·cm
These are the large motors which need to hold almost the entire weight of the arm. It is important that they have a lot of holding torque.
At the time I built the arm, these motors weren't available on alibaba. Here is the spec:

My replacements for this motor came from Ebay. The listing title was "Nema 23 Stepper Motor 112mm, 425oz,3A &4.2A, single & dual CE,ROSH". I ordered motors with an 8mm shaft and 28kg-cm of torque.
Motor 4: Stepper Motor SM35HT36-1004A, 1,8o step, 1A, 1400g·cm
This nema 14 motor is available from pololu here. The cost is $15.95 each.
Motor 5: Nema 17 SM42HT33-1334, 1,8o step, 1,33A, 2200 g·cm
Here are the specs for this motor, which was only available on Alibaba at the time I built my arm:

I found a replacement for this motor on Amazon. It is available here for $17.
Misc components:
625zz bearings: Amazon
608zz bearings: Amazon
624zz bearings: Amazon
623zz bearings: Amazon
M3 and M4 PEM inserts are available at mcmaster.com.
I ordered the T5 pulleys online, but lost the source. I originally tried to 3d-print these. I do NOT recommend that. The pulleys, especially the ones near the base, are put under some very high loads. Save yourself the trouble of having to re-assemble your arm and go straight to metal pulleys.
I ordered all of the bronze bushings from bronzebushings.com.
I ordered the belts at polybelt.com.