Continued from Intro.
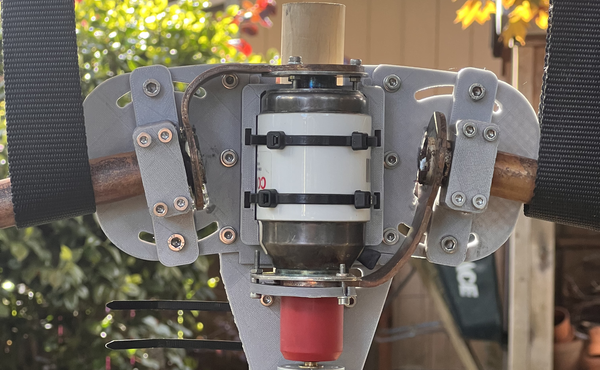
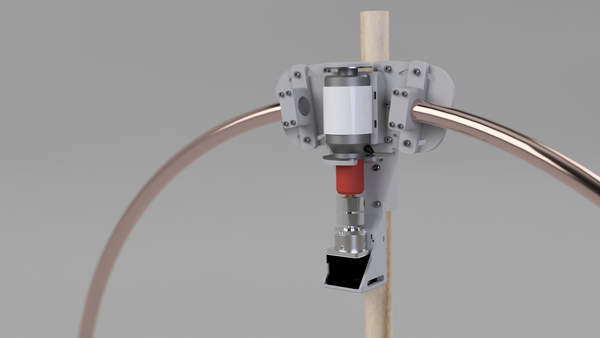
Many people assemble their loop antennas using copper pipe and 45 degree angle connectors to form an octogon. This approximates a circle well enough, but introduces some electrical resistance to the loop. I want to bend a piece of copper into a continuous loop to decrease the